MASS 의 장애물 탐지 및 충돌 회피
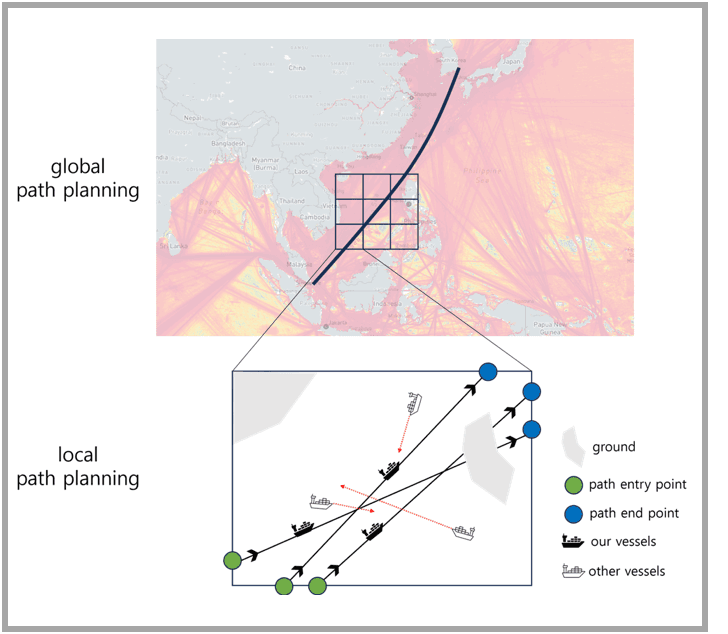
글로벌 및 로컬 경로 계획
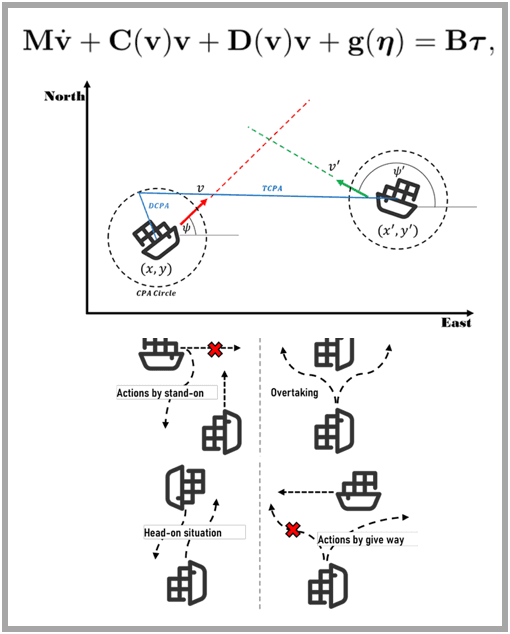
충돌 방지를 위한 선박 컨트롤 모델
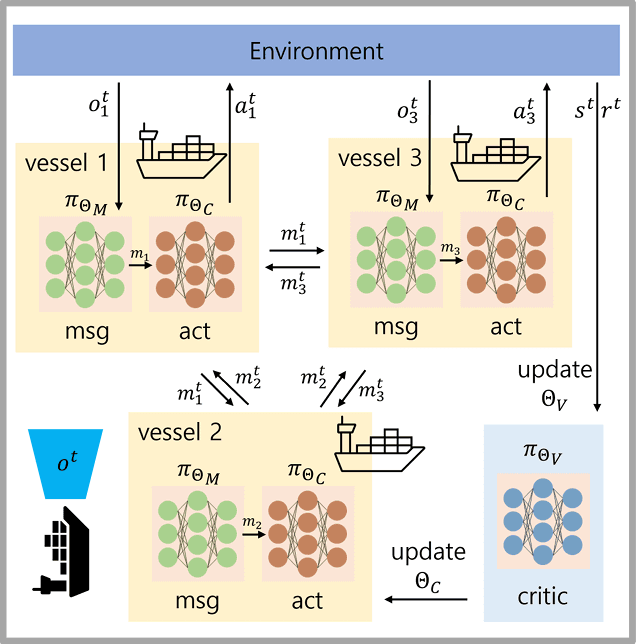
인접 선박간 정보 교환을 통한 경로 계획 훈련 과정
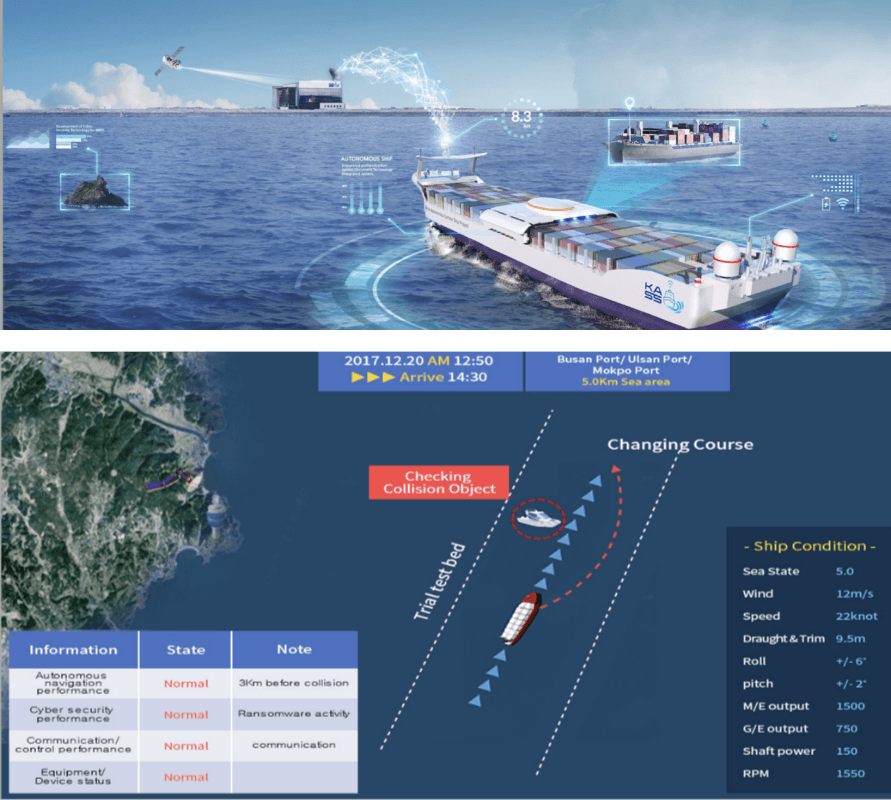
디지털 트윈 기반 교차 충돌 방지 및 항해 시나리오 검증
디지털 트윈 기반 교차 충돌 방지 및 항해 시나리오 검증
MASS (Maritime autonomous surface ships) 를 통한 선박 자율 항해 시스템
자율주행 선박을 구성하기 위한 기존의 장애물 탐지 및 충돌 회피 기술은 선박 컨트롤 모델에 의존함 선박간 통신을 통한 정보 교환을 수행하여 선박간 충돌을 방지하고, 모든 선박이 최선의 경로로 운항 MASS (Maritime autonomous surface ships) 를 통한 인간의 개입 없는 항해 시스템 개발 - 자율주행 선박을 구성하기 위해 장애물 탐지 및 충돌 회피(COLEGs)기술이 필수적으로 요구됨 - 선박간 통신을 통한 정보 교환을 수행하여 선박간 충돌을 방지하고, 모든 선박이 최선의 경로로 운항